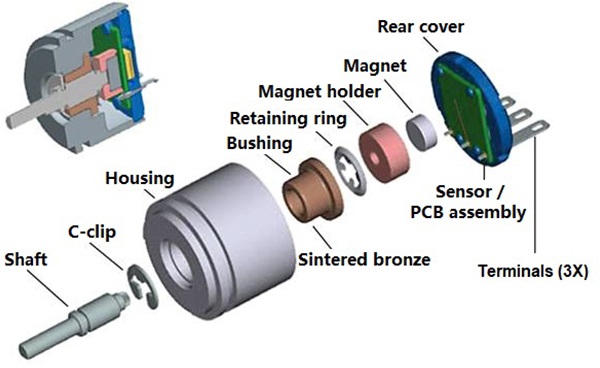
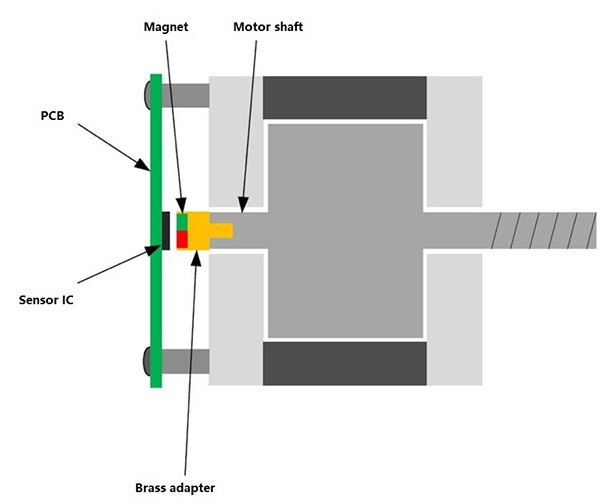
Kui teil on võimalus magnetiline pöörlev kodeerija lahti võtta, näete tavaliselt ülaltoodud sisemist struktuuri. Magnetkooder koosneb mehaanilisest võllist, kestastruktuurist, koodri otsas olevast PCB-sõlmest ja väikesestketasmagnetpöörlevad koos võlliga mehaanilise võlli otsas.
Kuidas magnetkooder mõõdab pöörlemisasendi tagasisidet?
Halli efekt: potentsiaalide erinevuse teke elektrivoolu kandvas juhis, kui magnetvälja rakendatakse vooluga risti.
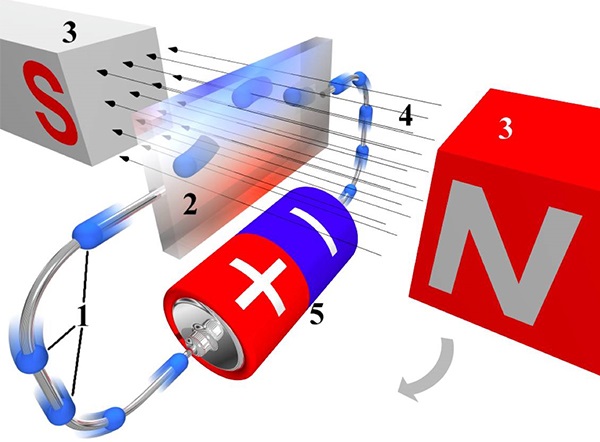
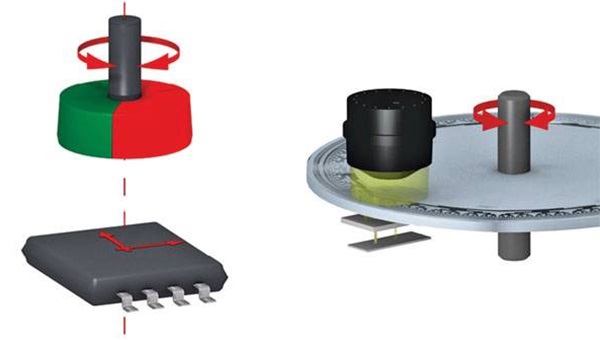
Kui juhile rakendatavat magnetvälja pöörata ülaltoodud noolega näidatud suunas, kusjuures teljeks on voolu liikumistee, muutub Halli potentsiaalide erinevus magnetvälja ja juhi vahelise nurga muutumise tõttu ning Potentsiaalse erinevuse muutustrend on sinusoidne kõver. Seetõttu saab pingestatud juhi mõlemal küljel oleva pinge põhjal arvutada magnetvälja pöördenurga vastupidiselt. See on magnetilise kodeerija põhiline töömehhanism pöörlemisasendi tagasiside mõõtmisel.
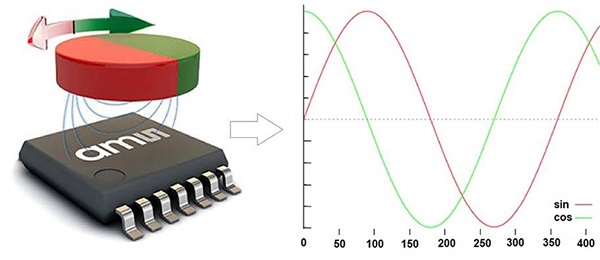
Sarnaselt põhimõttele, et lahendaja kasutab kahte vastastikku risti asetsevate väljundpoolide komplekti, on magnetvälja pöörlemisasendi kordumatu vastavuse tagamiseks vaja ka magnetkooderis kahte (või kahte paari) vastastikku risti asetsevate voolusuundadega hall-induktsioonielementi. ja väljundpinge (kombinatsioon).
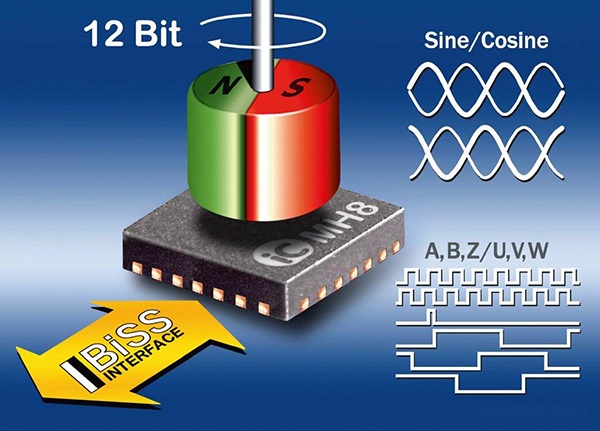
Tänapäeval on magnetkodeerijates kasutatavad Halli andurid (kiibid) üldiselt kõrge integratsiooniastmega, mis mitte ainult ei integreeri Halli pooljuhtkomponente ja nendega seotud signaalitöötlus- ja reguleerimisahelaid, vaid integreerib ka erinevat tüüpi signaaliväljundmooduleid, nagu siinus- ja koosinusanaloog. signaalid, ruutlaine digitaalse taseme signaalid või siini side väljundseadmed.
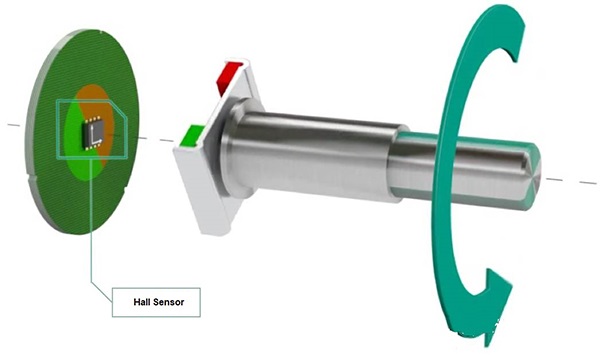
Sel viisil paigaldage püsimagnet, nagu paagutatud neodüümmagnet, mis tekitab magnetvälja anduri pöörleva võlli otsa, asetage ülalmainitud Halli anduri kiip PCB trükkplaadile ja lähenege kodeerija otsas olevale püsimagnetile. võll vastavalt teatud nõuetele (suund ja kaugus).
Analüüsides saalianduri pingesignaali väljundit läbi PCB trükkplaadi, saab tuvastada koodri rootori pöörlemisasendi.
Magnetkodeeringu struktuur ja tööpõhimõte määravad selle püsimagneti erinõuded, näiteks magneti materjal, magneti kuju, magnetiseerimise suund jne.diametraalselt magnetiseeritud neodüümmagnetketas on parim magneti valik. Ningbo Horizon Magnetics on kogenud paljudele tootjatele mõnes suuruses magnetkodeeringute tarnimisel.diametraalsed neodüümi ketasmagnetid, D6x2,5mm ja D10x2,5mm diameetriga ketas Neodüümmagnetid, millest kõige populaarsemad mudelid.
On näha, et võrreldes traditsioonilise optilise kodeerijaga ei vaja magnetkooder keerulist koodiketast ja valgusallikat, komponentide arv on väiksem ja tuvastamise struktuur on lihtsam. Lisaks on Halli elemendil endal ka palju eeliseid, nagu kindel struktuur, väiksus, kerge kaal, pikk kasutusiga, vibratsioonikindlus, ei karda tolmu, õli, veeauru ja soolaudu saastumist ega korrosiooni.
Kui elektrimootori pöörlemisasendi tagasisidele rakendatakse magnetilise kodeerija tehnoloogiat, siispaagutatud NdFeB magnetsilinderMagnetkooderi saab paigaldada otse mootori võlli otsa. Sel viisil saab see kõrvaldada traditsioonilise tagasiside anduri kasutamisel nõutava üleminekuühenduse laagri (või siduri) ja saavutada kontaktivaba asendi mõõtmise, mis vähendab anduri rikke (või isegi kahjustuse) ohtu mehaanilise võlli vibratsiooni tõttu. elektrimootori töö. Seetõttu aitab see parandada elektrimootori töö stabiilsust.
Postitusaeg: 21. juuli 2022